 Comment fonctionne un servomoteur ?
Comment fonctionne un servomoteur ?
Mar 05, 2024
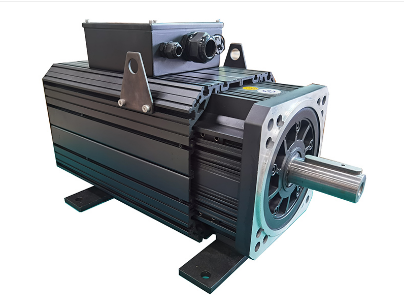
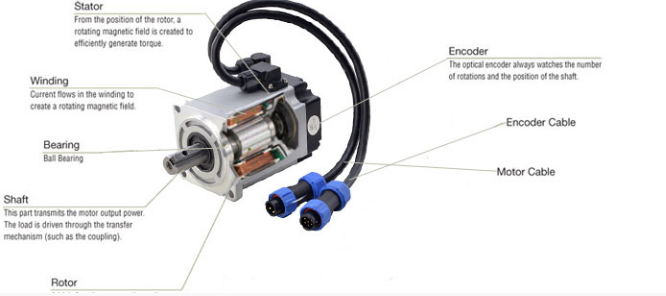
Le servomoteur fait référence au moteur qui contrôle le fonctionnement des composants mécaniques du système d'asservissement. La vitesse du rotor du servomoteur est contrôlé par le signal d'entrée et peut répondre rapidement. Dans le système de contrôle automatique, il est utilisé comme actionneur et présente les caractéristiques d'une petite constante de temps électromécanique, d'une linéarité élevée, d'une tension de démarrage, etc. Il peut convertir le signal électrique reçu en sortie de déplacement angulaire ou de vitesse angulaire sur l'arbre du moteur. Divisé en deux catégories : servomoteurs DC et AC. Principe de fonctionnementUn mécanisme d'asservissement est un système de contrôle automatique qui permet aux quantités contrôlées de sortie telles que la position, l'orientation et l'état d'un objet de suivre tout changement dans la cible d'entrée (ou une valeur donnée). Le servo s'appuie principalement sur des impulsions pour le positionnement. Fondamentalement, on peut comprendre que lorsque le servomoteur reçoit une impulsion, il tournera selon un angle correspondant à l'impulsion, réalisant ainsi un déplacement. Étant donné que le servomoteur lui-même a pour fonction d'émettre des impulsions, chaque fois que le servomoteur tourne d'un angle, il émettra un nombre correspondant d'impulsions. De cette façon, il forme une réponse aux impulsions reçues par le servomoteur, ou est appelé boucle fermée. De cette façon, le système saura combien d'impulsions sont envoyées au servomoteur et combien d'impulsions sont reçues en même temps. De cette manière, la rotation du moteur peut être contrôlée de manière très précise, obtenant ainsi un positionnement précis pouvant atteindre 0,001 mm.Classification des servomoteursLes servomoteurs peuvent être divisés en servomoteurs à courant continu et servomoteurs à courant alternatif.Servomoteur à courant continuLa structure de base d'un servo DC est similaire à celle d'un moteur DC général. Vitesse du moteur n=E/K1j=(Ua-IaRa)/K1j, où E est la force contre-électromotrice de l'induit, K est une constante, j est le flux magnétique de chaque pôle, Ua et Ia sont la tension d'induit et le courant d'induit, Ra est La résistance d'induit, changeant Ua ou changeant φ, peut contrôler la vitesse du servomoteur à courant continu, mais la méthode de contrôle de la tension d'induit est généralement utilisée. Dans le servomoteur CC à aimant permanent, l'enroulement d'excitation est remplacé par un aimant permanent et le flux magnétique φ est constant. . Le servomoteur CC présente de bonnes caractéristiques de réglage linéaire et une réponse rapide.Cependant, les servomoteurs AC ont des limites en termes de commutation et de vitesse des balais, ont une résistance supplémentaire et produisent des particules d'usure.Servomoteur à courant alternatifLa structure de base d'un servomoteur AC est similaire à celle d'un moteur à induction AC (moteur asynchrone). Il y a deux enroulements d'excitation Wf et des enroulements de commande WcoWf avec un déplacement d'espace de phase d'un angle électrique de 90° sur le stator. Ils sont connectés à une tension alternative constante et utilisent les changements de tension alternative ou de phase appliqués à Wc pour contrôler le fonctionnement du moteur.Les servomoteurs AC présentent les caractéristiques d'un fonctionnement stable, d'une bonne contrôlabilité, d'une réponse rapide, d'une sensibilité élevée et d'indicateurs de non-linéarité stricts des caractéristiques mécaniques et des caractéristiques de réglage (qui doivent être inférieurs à 10 % à 15 % et inférieurs à 15 % à 25 % respectivement). .Shungrui Motor, une filiale de Shunge, est spécialisée dans les servomoteurs AC à aimants permanents de haute puissance et à couple élevé. Il existe actuellement deux séries, 18 et 25, qui peuvent répondre aux besoins de la plupart des clients.Nous pouvons également fournir des services de personnalisation de moteurs en fonction des besoins du client, ce qui est très rentable. Bienvenue à nous contacter pour consultation.
LIRE LA SUITE

 Connaissez-vous la classification des moteurs de commande ?
Connaissez-vous la classification des moteurs de commande ?
 Qu'est-ce qu'un servomoteur ?
Qu'est-ce qu'un servomoteur ?
 Comment choisir un servomoteur pour sa propre production ?
Comment choisir un servomoteur pour sa propre production ?






 IPv6 RÉSEAU PRIS EN CHARGE
IPv6 RÉSEAU PRIS EN CHARGE en
en fr
fr es
es
